Aktive Projekte





Abgeschlossene Projekte




Leitung: Prof. Paffenholz
Team: Waseem Iqbal
Laufzeit: 03-2023 bis 08-2024
Untersuchungen zur Eignung einer Datenfusion von Daten aus Open Data Quellen (GNSS- und SAR-Daten sowie Gebäude- und Verkehrsmodelle, insbesondere von SAPOS, BKG und Copernicus Prog)
Problemstellung
Die alternde Infrastruktur auf dem Landweg, der Schiene und dem Wasser erfordert bedeutende Ressourcen für die Sicherstellung der Betriebssicherheit. Das Monitoring von Deformationen, insbesondere an Brückenbauwerken und anderen wichtigen Infrastrukturen, verursacht durch Alterung, Materialermüdung und langsam (auch klimabedingt) verlaufende Bodenbewegungen, ist derzeit sehr kostenintensiv. Es gilt daher, massenhaft einsetzbare und kosteneffiziente Analyseverfahren anhand von Open Data Quellen kombiniert mit lokaler GNSS-Sensorik zu entwickeln und zu evaluieren, die es bisher nicht gibt.
Projektziel
Entwicklung, Test sowie Verifizierung eines kosteneffizienten Monitoring-Prozesses durch Generierung eines Mehrwertes durch die Fusion von staatlich vorhandenen Open Data Quellen der Länder (GNSS, tlw. Gebäudemodelle) und insb. des Bundes (primär Radardaten aus dem Copernicus-Programm, tlw. Gebäudemodelle, Verkehrswegedaten) und deren Kombination mit objektspezifischer lokaler GNSS-Sensorik.
Durchführung
Im Projekt sollen Möglichkeiten der strengen Fusion von freien GNSS- und Radardaten sowie 3D-Stadtmodellen und Verkehrswegeplänen zum Zweck der besseren Beurteilung von Deformationen an Bauwerken in Kombination mit lokal installierter Sensorik untersucht werden, insb. an Infrastrukturen wie Bahntrassen, Energie-Leitungstrassen und (Brücken-) Bauwerken. Der Mehrwert der Daten wird insbesondere durch KI-Analysen und raum-zeitliche Parameterschätzung in Kombination mit lokalen GNSS-Daten generiert.






Leitung: Prof. Paffenholz
Team: Alexander Dorndorf, Yu Lan
Laufzeit: 11-2020 bis 04-2023
KINO steht für KI-Assistenzsystem für XR-Navigationslösungen zur effizienten und präzisen Bestimmung von Posen auf Basis 3D-punktwolkenbasierter Objektraumabbildungen mit mobilen Consumer Endgeräten. Das Forschungsprojekt KINO ist in das Kooperationsnetzwerk twin4bim, welches sich Technologien digitaler Zwillinge für räumliche Umgebunden widmet, eingebunden.
Das Ziel des Projekts ist es, den Akteuren im Bauwesen mit digitalen Zwillingen und unter Nutzung handelsüblicher Smartphones, einen Zugang zum aktuellen Zustand und der Entwicklung einer Baumaßnahme mithilfe von Augmented- und Mixed Reality-Szenarien (XR-Szenarien) zu ermöglichen. Hierfür sollen Methoden entwickelt werden, mit denen der geplante Baufortschritt mit der tatsächlichen Situation vor Ort visuell abgeglichen werden kann und Übereinstimmungen und Abweichungen mittels AR-Technologiensichtbar gemacht werden können.
Die Digitalisierung in der Baubranche und die Einführung des Building Information Modeling (BIM) für alle teilnehmenden Akteure ermöglichen einem großen und diversen Anwenderkreis den Zugang zu geobasierten Daten und Diensten aus zentralen und interoperablen Datenspeichern. Diese Daten können mittlerweile in einem hohen Detailierungsgrad und großer Aktualität erfasst werden. Gleichzeitig existieren immer mehr 3D-Planungsdaten mit teilweise georeferenzierten Bezugsrahmen, so dass der Bedarf stetig wächst, Echt- und Planungsdaten in Mixed-Reality-Szenarien (XR-Szenarien) vor Ort zu überlagern und gemeinsam darzustellen. Während dies im geodätischen Anwendungsfeld mit entsprechend teuren und teilweise sehr komplexen Equipment sinnvoll realisiert werden kann, ist es für die breite Masse der Endverbraucher, aber auch für Fachanwender außerhalb der Geodäsie bisher nicht möglich eine Selbstlokalisation mit einer akzeptablen Genauigkeit vorzunehmen, was bisher den gewünschten und notwendigen Einsatz von XR-Szenarien erheblich beeinträchtigt.
Das Teilprojekt KINO - Sensorfusion (Laserscanner, Positions- und MEMS-Sensoren) und stochastisches Modell der 3D-Punkwolken, das an der TUC bearbeitet wird, befasst sich mit der Sensorfusion eines objekterfassenden Sensors (Laserscanner) mit Positionssensoren (low-cost GNSS) und Navigationssensoren (MEMS). Mit dieser Sensorfusion soll die Effizienz des Erfassungsworkflows durch eine simultane Erfassung der Position und Orientierung des Laserscanners während der eigentlichen Erfassung der 3D-Punktwolke erreicht werden. Die Position und Orientierung des Laserscanners wird für die Geo-Referenzierung der 3D-Punktwolke benötigt, um diese in einem bekannten Koordinatensystem exakt verorten zu können. Eine konsequente Berücksichtigung der Unsicherheiten aus der Geo-Referenzierung bei der weiteren Verarbeitung der 3D-Punktwolken erlaubt qualitätsgesicherte Aussagen in den Folgeprozessen. Solche Folgeprozesse sind beispielsweise die XR-Darstellung und Navigation mit mobilen Consumer Endgeräten.

Leadership: Prof. Kargoll (HS Anhalt), PD Dr. Alkhatib (Leibniz Universität Hannover), Prof. Paffenholz
Team: Boris Kargoll, Hamza Alkhatib, Jens-André Paffenholz, Alexander Dorndorf, Mohammad Omidalizarandi, Christian Wolff
Term: 10-2018 to 09-2021
More information on the project and its related publications can be found at ResearchGate
This research field aims at the development of a unified robust adjustment theory and of corresponding computationally efficient expectation maximization (EM) algorithms to handle outliers, data gaps, colored noise and cross-correlations within geodetic measurement series simultaneously. Various kinds of stationary and nonstationary Gauss-Markov models are investigated (see the figure below). To include given prior information for the unknown parameters, Bayesian models and inferential techniques are also devised. Applications include the geo-referencing of a static multi-sensor system and deformation monitoring of an arch bridge.
Modern geodetic sensors often produce multiple spatial time series which contain huge numbers of measurements, numerous outliers as well as data gaps, and random errors that are characterized by considerable auto- and cross-correlations (i.e., colored noise). In view of these adversities, which cannot be resolved by current geodetic data analysis tools in their entirety, we develop both classical and Bayesian statistics in connection with adjustment procedures that allow for a robust and efficient estimation of parametric models from such spatio-temporal measurement series.
To facilitate simultaneous robustness and statistical as well as computational efficiency, we employ on the one hand the principle of expectation maximization (EM). This enables an imputation of the data gaps and concurrently an adaptive estimation of the parameters of the functional model, of the coefficients of a vector autoregressive moving-average (VARMA) colored noise model, and of the shape parameters of the underlying error distribution. The latter is defined by a multivariate, scaled (Student's) t-distribution and involves a data-adaptable degree of freedom and scale factor. By estimating these quantities, the shape and in particular the tail characteristics of the probability density function is adapted to the actual error and outlier characteristics present in the data. We also allow for dynamic changes of the parameters of the functional and of the noise model.
Finally, we investigate Bayesian procedures based on Mean-Field Variational Bayes and Markov Chain Monte Carlo (MCMC) techniques, which allow for the incorporation of prior information regarding the parameters of the functional model, of the VARMA model and of the underlying t-distribution into the adaptive robust adjustment. Since the adjustment yields detailed probabilistic information regarding all of the unknown model parameters, we will for instance also be able to rigorously test hypotheses about the assumed error distribution, about suspected auto-/cross-correlation patterns, and about the time-variability of such patterns. We apply the static version of the general observation model and estimation procedure to adjustment problems based on geodetic data sets stemming from a geo-referencing of a static multi-sensor-system, therein the referencing sensor can be 3D positioning sensors, like GNSS equipment or tacheometer. The dynamic version is applied to loading test data stemming from an arch bridge. Due to the anticipated high level of flexibility and efficiency of the methods, we expect that they may be applied also to other types of geodetic sensor data, as obtained e.g. in satellite geodesy.
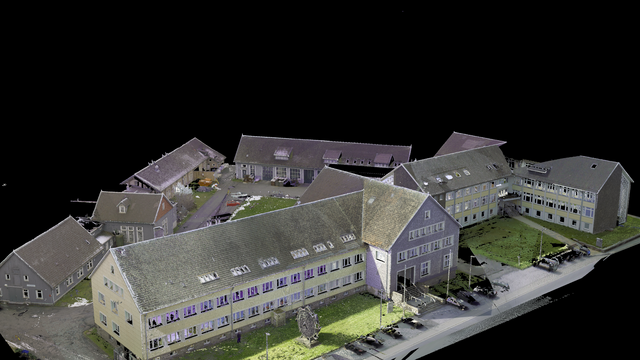
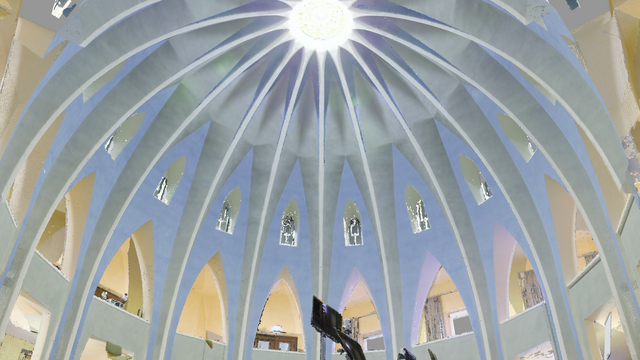
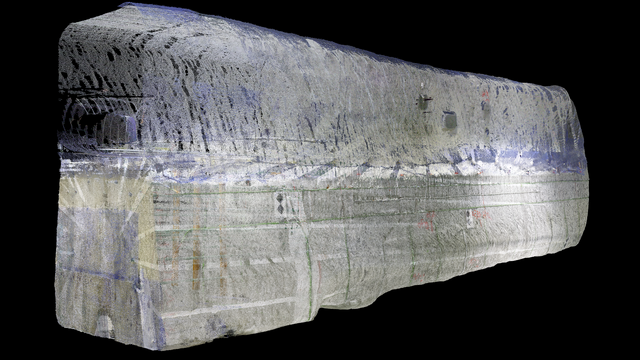
3D-Punktwolken beispielhafter natürlicher und anthropogener Strukturen
Das Team Geomatics des Departments of Geo-Engineering zeigt hierausgewählte, animierte 3D-Punktwolken von natürlichen und anthropogenen Strukturen. Die 3D-Punktwolken wurden mit terrestrischen Laserscannern vom Typ Leica Geosystems RTC360 und Zoller+Fröhlich IMAGER 5016 erfasst.
Mögliche Anwendungsgebiete dieser 3D-Punktwolken finden sich in der klassischen, geometrischen und flächenhaften Dokumentation natürlicher und anthropogener teils komplexer Strukturen und Geometrien für unterschiedlichste Zwecke wie dem Monitoring oder dem change detection, in der Erstellung von Geländemodellen oder in der Schaffung der Datengrundlage für den digitalen Zwillingen im Kontext des Building Information Modelling (BIM).